試験車両の4WDシャシダイナモメータ上の車両拘束状態を定量的に評価するための2つの方法、すなわち
①ALR仕事評価法
②ASR仕事評価法
が意味するものやそれぞれの手法の特長などについては、次ページで詳しく解説します。
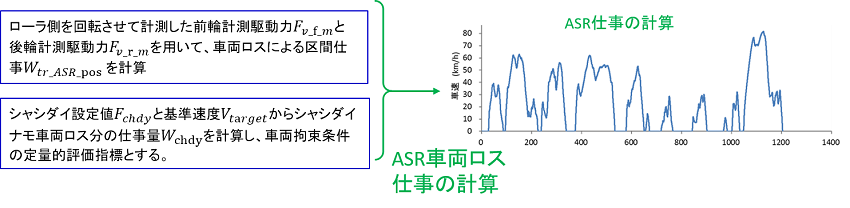
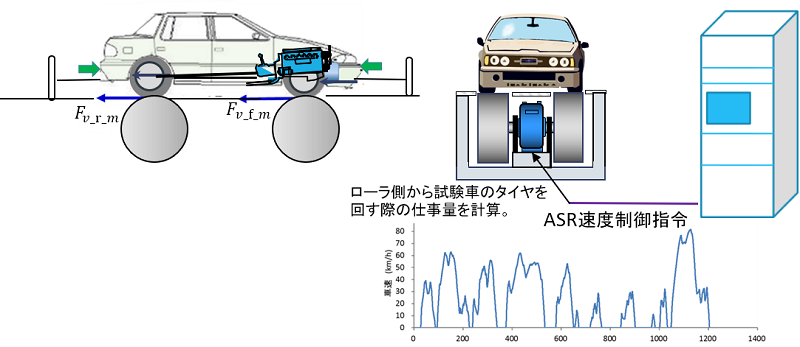
このASR評価試験では、前輪ローラと後輪ローラが常に等速度で回転する制御条件(シャシダイナモメータの4WD等速制御モード)を与えて、WLTCモードなど試験する走行モードの速度変化でローラ上をタイヤが回転する条件を試験車に与えます(ASR駆動制御)。この時の前輪ローラ表面力(駆動力)𝐹_(𝑣_f_𝑚)と後輪ローラ側表面力(駆動力)𝐹_(𝑣_r_𝑚)及びローラ回転速度をモード全域に渡って連続測定し、モード全体のデータを集録します。
この時のモード全体での仕事量𝑊_(𝑡𝑟_𝐴𝑆𝑅_pos)は、下式を使って求めます。
𝑊_(𝑡𝑟_𝐴𝑆𝑅_pos) =∫( 𝐹_(𝑣_f_𝑚)+ 𝐹_(𝑣_r_𝑚))×V/3.6dt
ただしASR仕事の計算では、モードの各瞬間で計算仕事率がマイナスになるような減速域では、車両側のロスがマイナスの慣性力によって補われている点を考慮して、車両ロス仕事の積和演算の対象域としては除外する処理にしています。
シャシダイナモメータにある速度制御モードを選択し、試験車を載せたローラをダイナモ側から回すことで、モードと同じ速度変化を試験車に与えます。この時のローラ表面力の瞬時値は、各速度条件における車両側の抵抗力(転がり抵抗+車両側の回転慣性抵抗)となります。各瞬間のローラ表面力とローラ回転速度を測定し両者をかけたものをモード全体で積和します。この積算値𝑊_(𝑡𝑟_𝐴𝑆𝑅_pos)は、台上で車が回された時の車両ロス分に起因したモード仕事量となります。車両の拘束条件が原因で余分な車両ロスが生じた場合には、
𝑊_(𝑡𝑟_𝐴𝑆𝑅_pos) の値が増加するので、その変化を捉えることで車両拘束条件の定量的評価指標を求める方法が、ASR仕事評価法です。
公益財団法人日本自動車輸送技術協会は、自動車の安全確保、環境保全に役立つ各種の試験、調査、研究を行うことで社会に貢献しています。