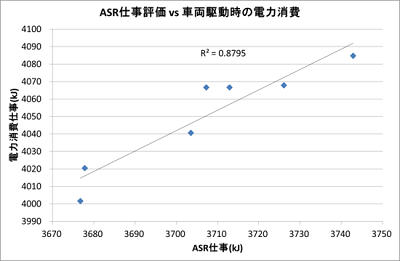
図E-消費電力量とASR仕事の相関性
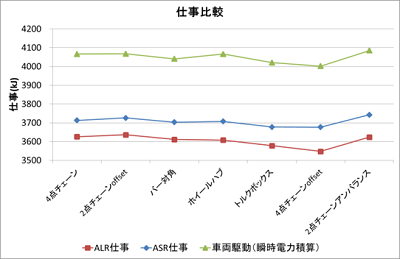
図D-各種拘束条件でのASR仕事と車両駆動仕事の比較
また,下の図Eに示すように,瞬時消費電力の積算とASR仕事の間には相関性があり,ASR仕事評価が車両駆動状態で発生する動的な車両ロス影響を車両拘束条件別に反映できていることが確認されたことで、ASR仕事評価法の妥当性が検証できたと考えます。
JASO E016に規定されたALR仕事とASR仕事に基づく評価方法が,車両駆動状態で発生する動的な車両ロスの影響を車両拘束条件別に適切に反映されているかを検証するため,シャシダイナモ試験法分科会では電動車両を用いた実験を実施し、車両駆動時のバッテリー消費電力量とALR仕事,ASR仕事の各評価方法との比較分析を行いました。結果を下の図Dに示します。なお,評価条件を合わせるため車両駆動時の動的ロスは50ms毎の瞬時電力を積算し,ASR仕事の計算処理と同様に,マイナス慣性力が作用して車両側のロス仕事が実質ゼロになる状態(走行抵抗式から計算)やアイドリング時のデータは,モード仕事量の積算には加えていません。
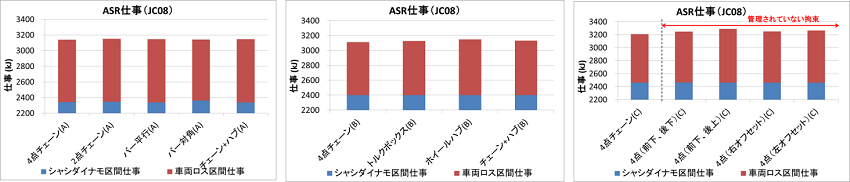
図C 車両拘束条件別のASR仕事の算出結果の例
( JASO E016 解説編 より)
ASR仕事評価法とは、台上の試験車に排出ガス・燃費試験のモードと同じ速度変化を与えた上で、その時に計測されたローラ表面力(回転駆動力)とローラの回転速度の各瞬時値から、モードの仕事量(ASR仕事量)を算出する方法です。ASR駆動でタイヤを外部から駆動した時のローラ表面力は,モード走行における各瞬間の車両側の抵抗力が反映されています。このローラ表面力には,モードの速度変化時の車両側回転部分の慣性抵抗も含まれます。さらに車側のころがり抵抗(動力伝達ロス+タイヤロス)の他に,車両拘束に伴って生じた車体への外力によりもたらされた走行抵抗の増加分も含まれます。つまりASR仕事が小さくなる拘束法ほど車由来の抵抗力に近づくといえるので、拘束条件の評価としてはより適切な指標であると考えられます.例えば車両拘束条件に左右されやすい車体の位置移動で生じたタイヤ損失の増加分は、ASR駆動時のローラ表面力に反映されるので、ASR仕事は,モード走行により近い状態で車両拘束の影響度を評価できる判定指標となります。拘束条件の適否を見る上では,ASR仕事が相対的に低いほど,車両拘束に伴う車両側ロスの増加が少なくなるので,拘束条件としてはより理想に近い状態にあることを意味します。
(2)ASR仕事による評価の特徴と評価結果の活用方策
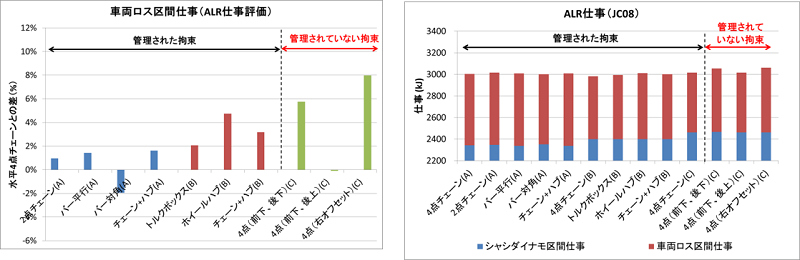
図B-ALR仕事の車両拘束条件別の比較
図A-車両ロス区間仕事の車両拘束条件別の比較
試験車がモード走行する際は,上記の車両ロス分のモード区間仕事にシャシダイナモ側で吸収した仕事分(空気抵抗分など路上走行分として加味された仕事)を加えた分、すなわちALR仕事が、車両への影響度を示す評価ファクターとなります。車両拘束方法の違いやヨーモーメント対策で張力管理を行った場合と管理をしない場合の仕事比較を下の図Bに示します。図Aの結果と同様に、拘束を適切に管理すれば4点チェーン式との差を少なくすることができ,一方で拘束を管理できていない状態では4点チェーン式との差が拡大してしまう傾向が示されています。
ALR仕事による評価では,モード走行後に台上惰行させた時のタイヤロスに対する車両拘束の影響度を見ることになります。この方法の具体的な使い方の例としては,走行抵抗設定時の惰行試験から算出されたALR仕事とコールドスタートのモード試験(燃費・排出ガスの測定)の直後に惰行試験を行って求めた車のALR仕事とを比較し,両者の一致度合から負荷設定時とモード試験時の車両拘束条件の同等性を検証すること等です。台上の惰行試験はどのような車両でも比較的容易に実施できるので,両方の拘束条件の違いを惰行時の転がり抵抗の差から数値化して示すことができます。この点からALR仕事評価法は、試験現場で導入しやすい拘束状態の検証方法であるというのが大きな特長でしょう。
(1)ALR仕事による評価の特徴と評価結果の活用方策の例
公益財団法人日本自動車輸送技術協会は、自動車の安全確保、環境保全に役立つ各種の試験、調査、研究を行うことで社会に貢献しています。